1.

判断是否得到插在指定引脚上指定模块的值
2.
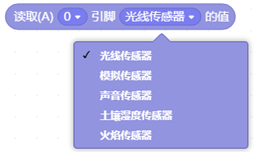
读取指定引脚上指定传感器的值
3.
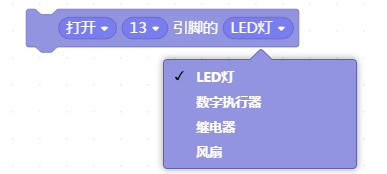
打开或关闭指定引脚上的指定模块
4.

设置指定引脚上指定模块为指定的值
5.

机器人以指定速度前进、后退、左转、右转
6.

设置指定电机以指定速度正传或者是反转
7.
机器人停止运动
8.

读取在指定引脚上超声波传感器的值
9.

读取指定引脚上的DS18B20温度传感器的值
10.

读取指定引脚上的LM35传感器的值
11.

判断指定引脚上的红外的指定引脚是否被按下
12.

设置指定引脚上的喇叭的指定音调的节拍为指定节拍
13.

设置指定引脚上的伺服舵机为指定度数
14.

设置八段数码管(D6-D13引脚)显示指定内容,注意八段数码管的引脚是给定的
15.

读取指定引脚上模式为低电平或高电平的脉冲宽度超过z指定时间
16.

系统运行时间的值
17.

判断串口是否有数据可读
18.

读取串口数据的值
19.

设置串口的波特率为指定的值