视频教程,点击观看
一、基于micro:bit的实时执行
目标:本示例演示如何如何操作micro:bit主控板与Scratch舞台交互,演示过程中不脱离电脑运行。
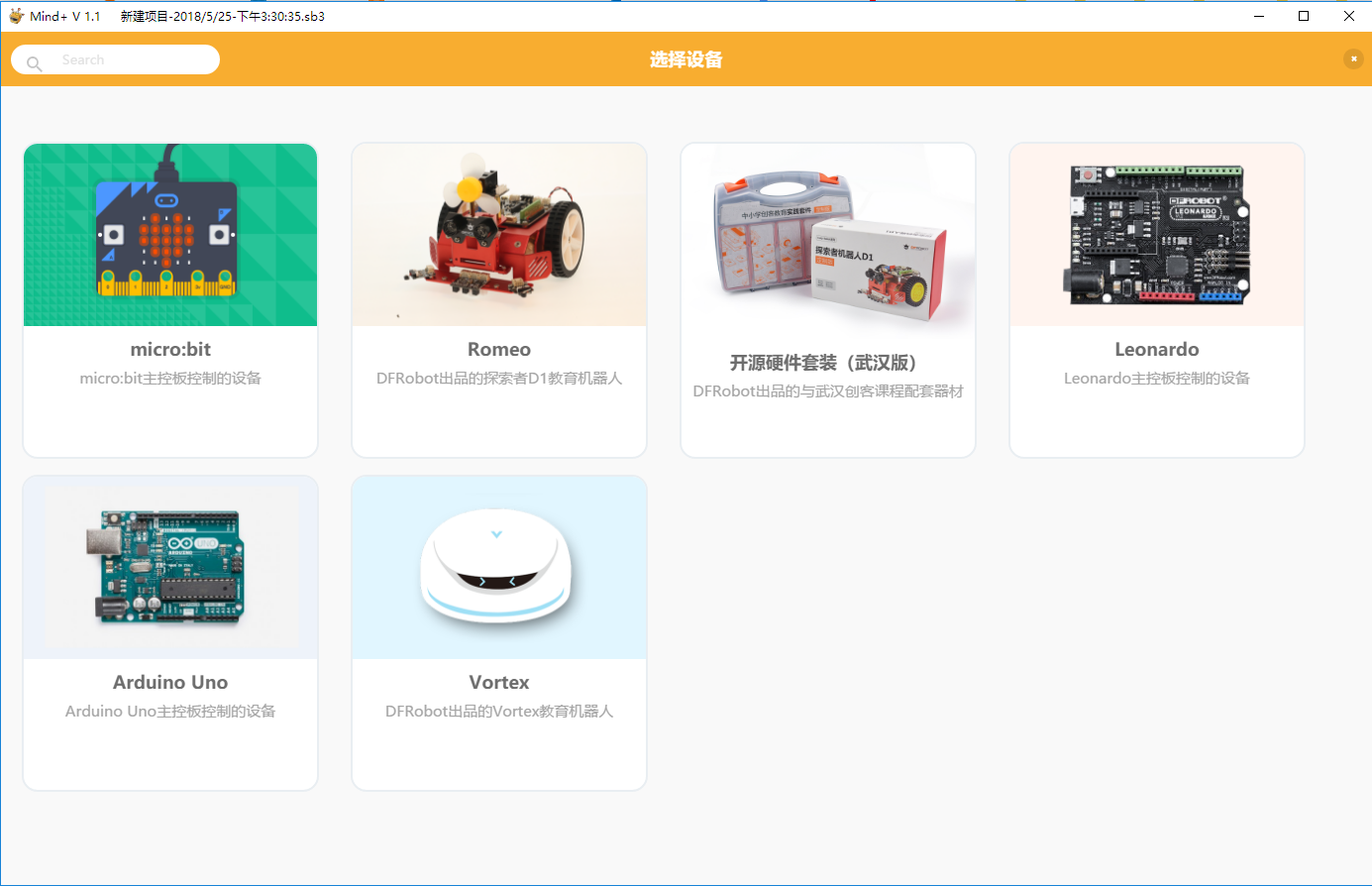
选择设备:
软件下载安装好之后,打开软件,根据你需要使用的硬件产品点击对应图片,此处我们选择第一个,micro:bit。
选择完设备后, 进入软件主界面如下:
写程序:
点击:菜单“学习”,选择“示例程序”
,在打开的示例程序界面中选择“AB按键控制猫移动”


示例程序会加载到主界面中,如下图: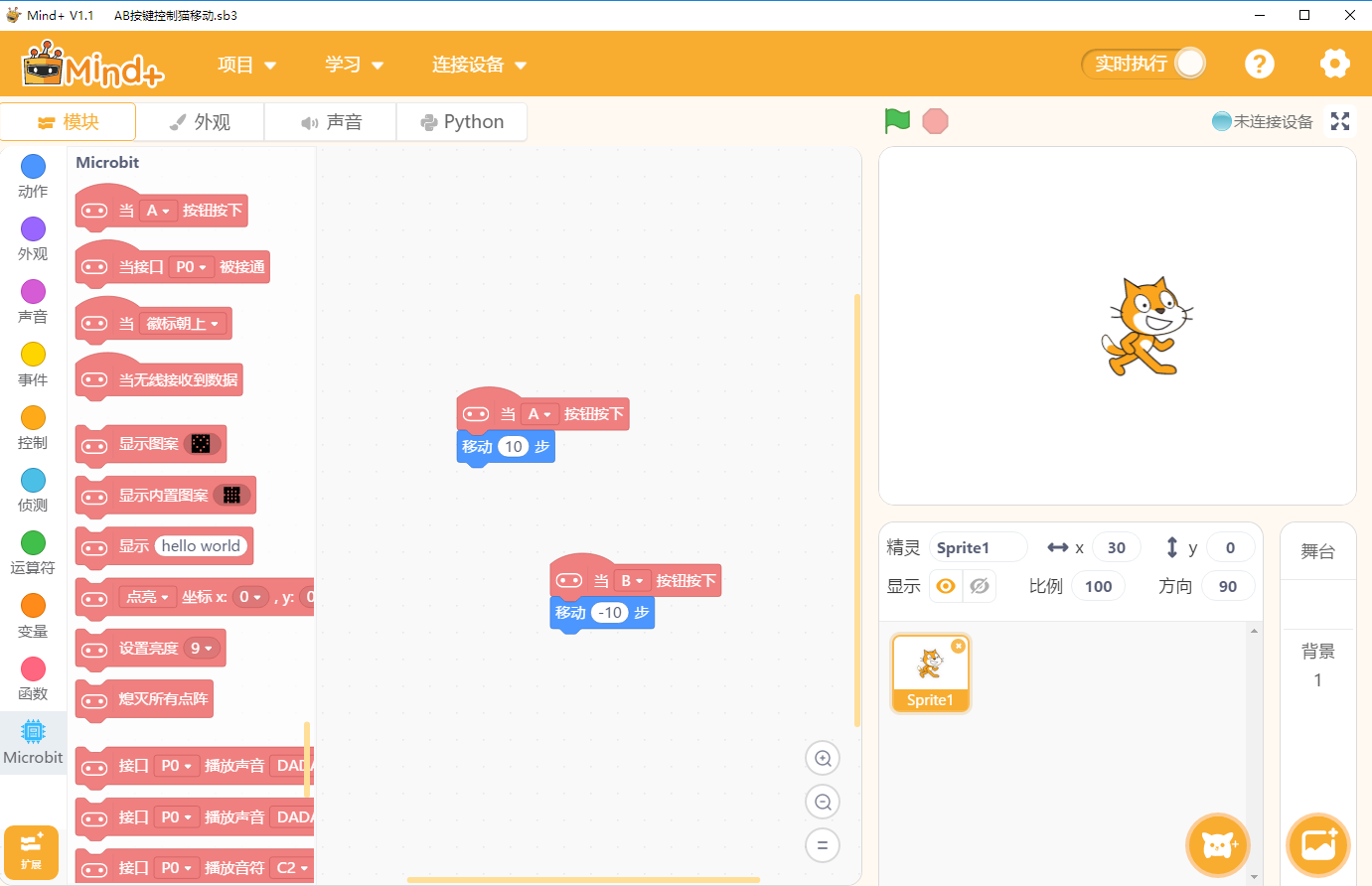 连接设备:
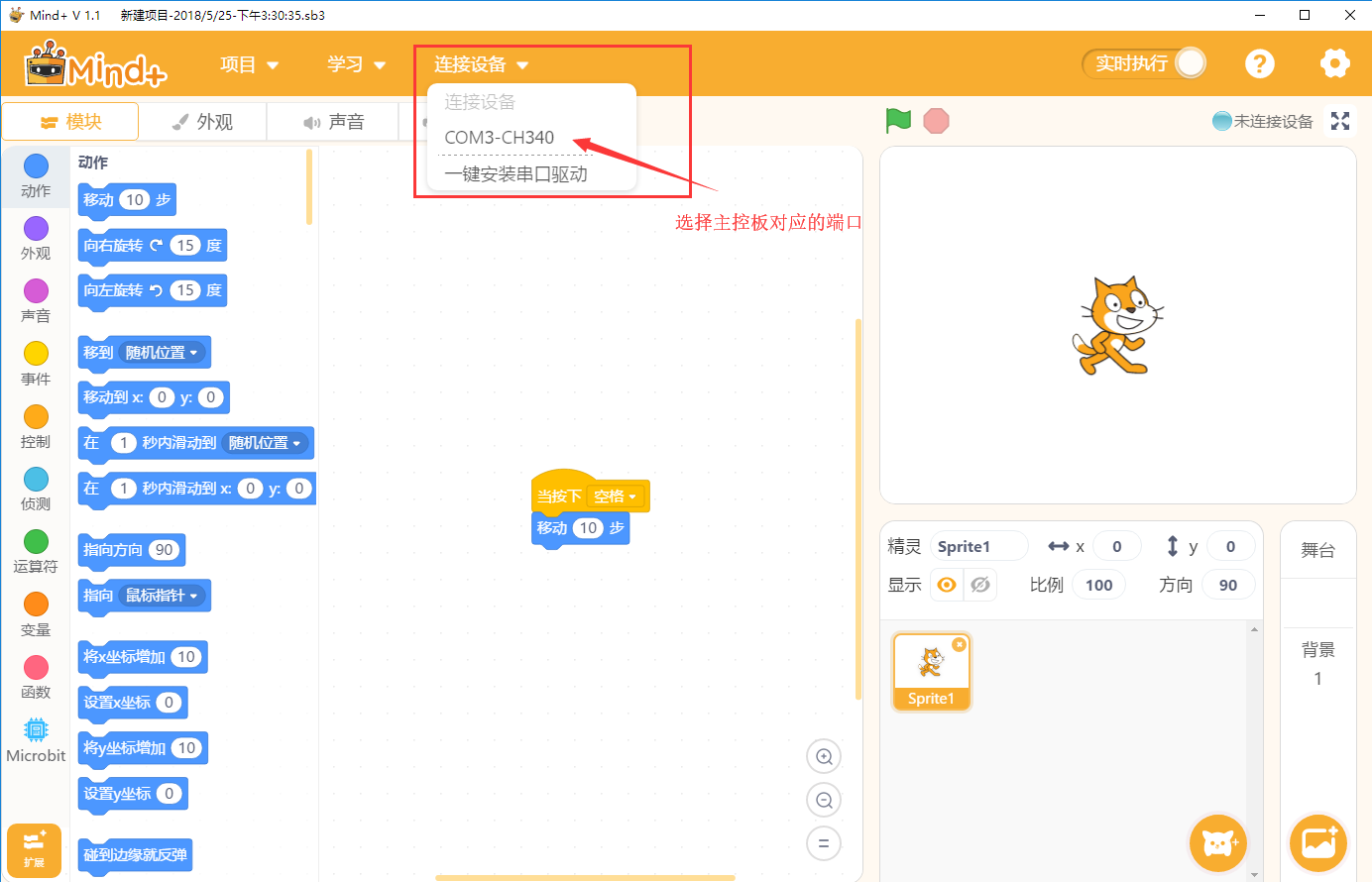
连接设备:
点击菜单选项“连接设备”,选择下方带"micro:bit"的主控板COM口,等待连接设备
成功。


校准:
若出现如下提示,说明需较准micro:bit

旋转microbti,上面的LED灯会滚动,需要使LED灯点亮所有四个边上的LED灯,之后LED灯全部熄灭表示校准完成。

结果:按下micro:bit板子上的A键和B键会发现右边舞台界面小猫会移动

二、基于micro:bit的上传执行
目标:在Mind+中编写一个micro:bit程序,上传到micro:bit中后,micro:bit脱离电脑也可以运行
编写程序:
切换到“上传执行”界面
选择micro:bit扩展
:
编写程序:选择不同图案


连接设备:
点击菜单选项“连接设备”,选择下方带"micro:bit"的主控板COM口,等待连接设备
成功。
上传程序:点击“上传到设备”,等待进度条走到100%。

结果:按下micro:bit主控板上的A键显示笑脸,按下B键显示哭脸。
二、基于arduino Romeo D1小车的实时执行
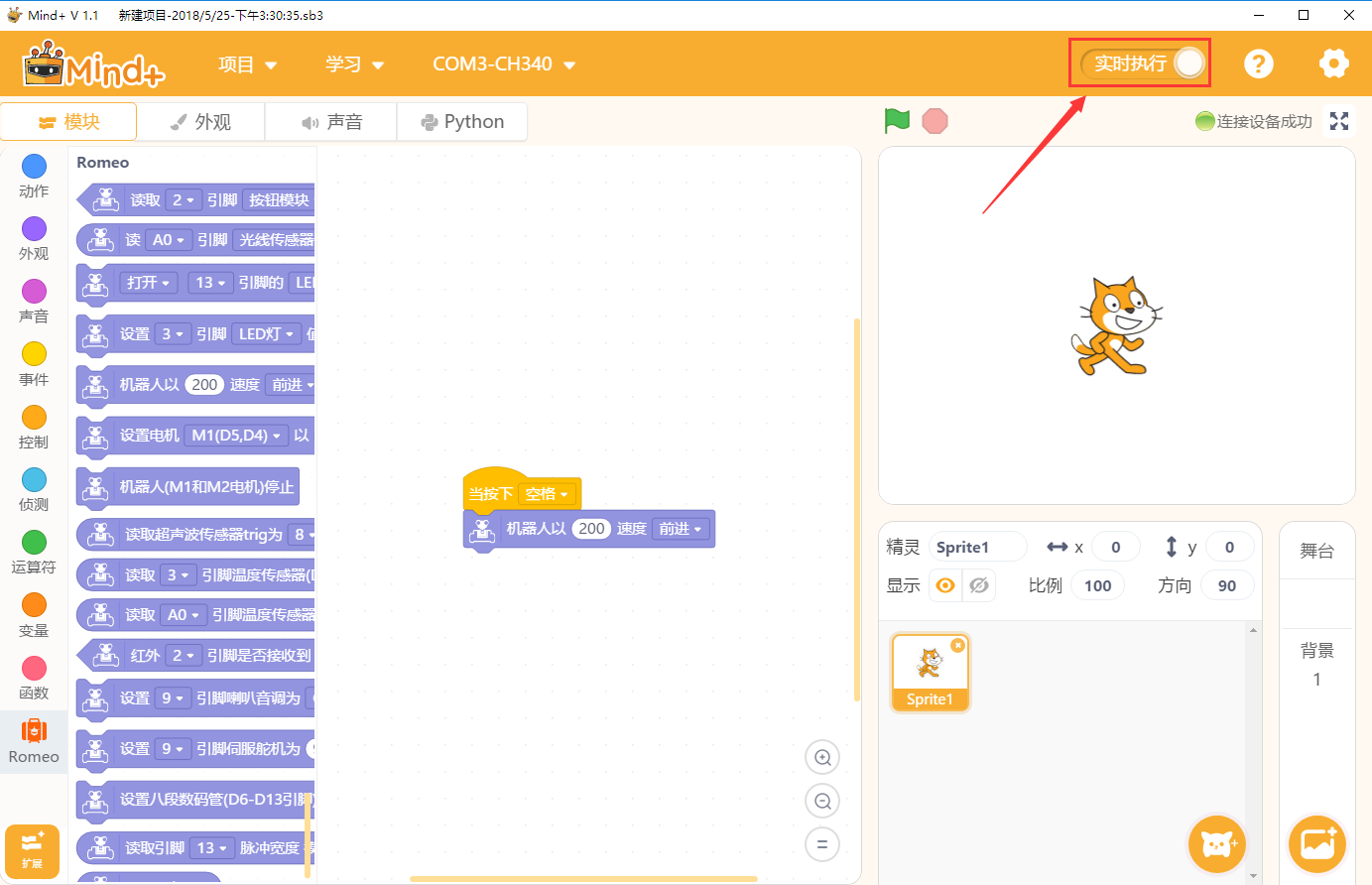
将Romeo主控板通过USB连接到电脑,打开Mind+选择ROMEO,进入实时执行界面,而后选择对应的串口,等待设备连接成功。
这里我们同样选择一个简单的程序,从事件模块和Romeo模块中拖出它们到指令操作区进行如组合,如下图所示。
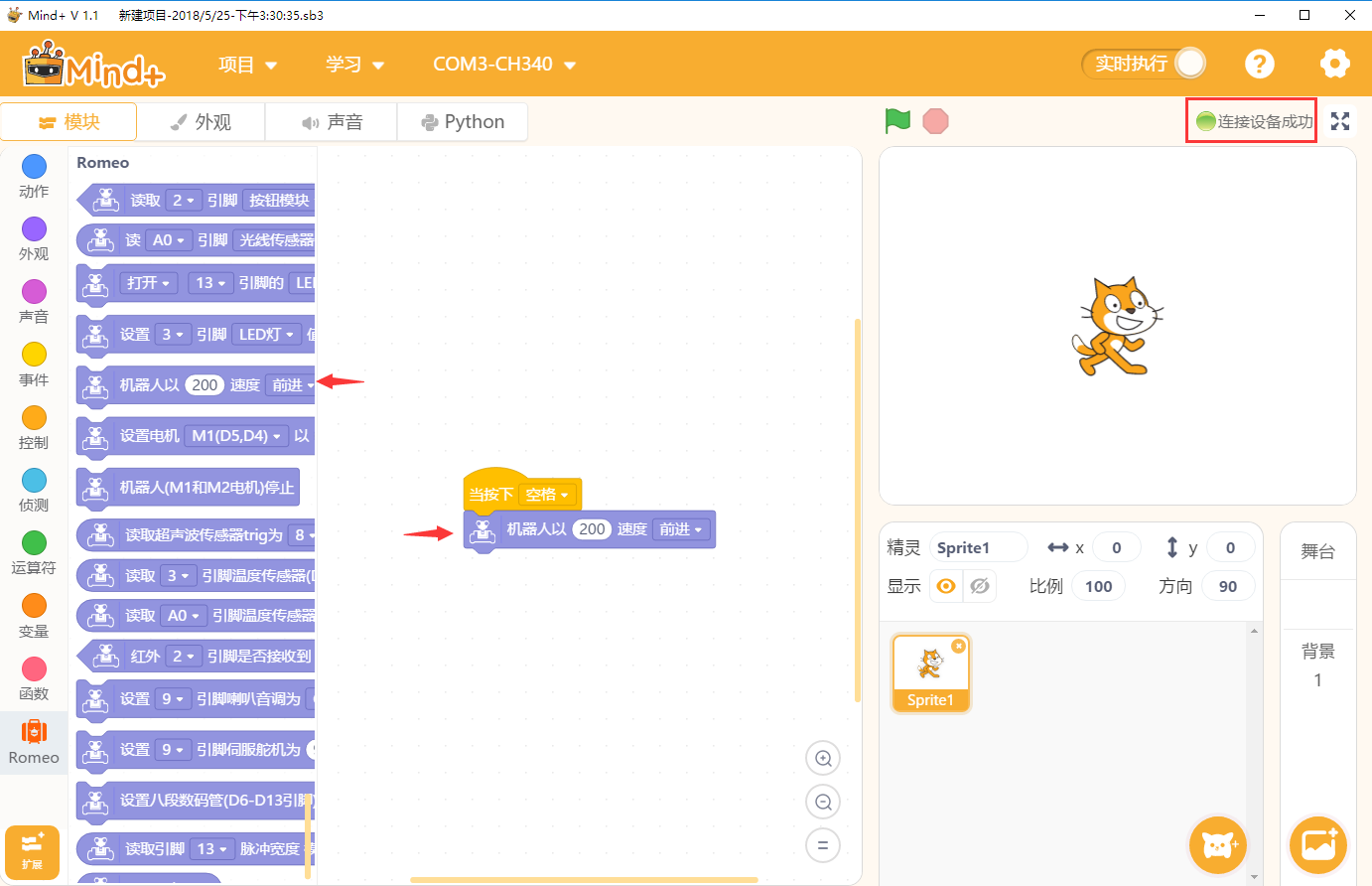
效果:按下电脑空格键,使用Romeo主控板驱动的D1小车开始以200的速度前进
三、基于Romeo D1小车的下载执行
将Romeo D1小车通过USB线连接到电脑,打开Mind+,扩展中选择Romeo,进入实时执行界面而后切换到下载执行界面,
连接设备相应串口

对指令进行如下图组合,而后点击”上传到设备”,等待上传完成
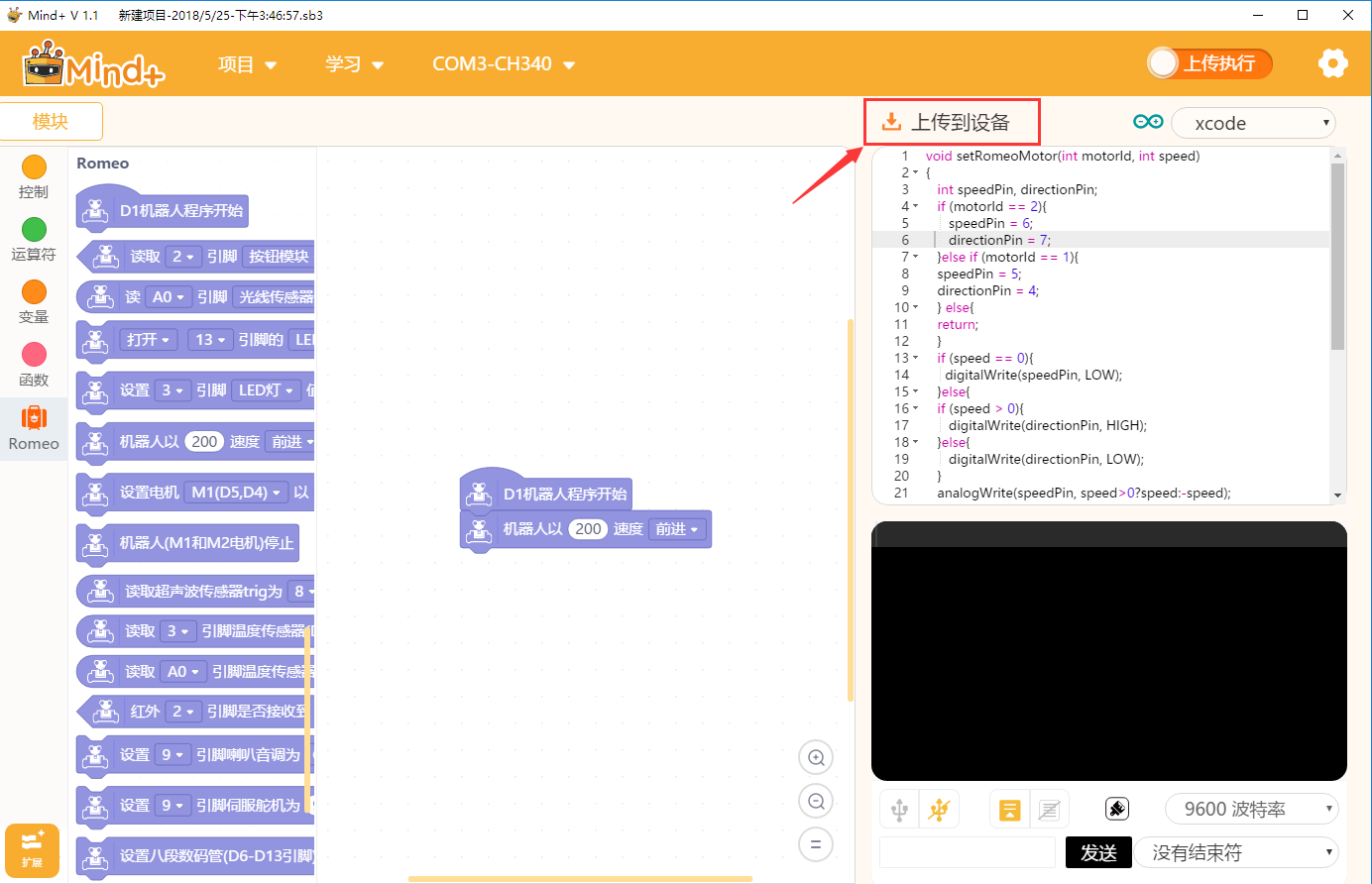
效果:拔掉USB线,小车开始以200的速度前进
四、基于vortex的实时执行
将vortex通过USB连接到电脑,打开Mind+,扩展中选择Vortex,进入实时执行界面,而后选择对应的串口,等待设备连接成功。对指令进行如下图组合

效果:按下键盘空格键,Vortex开始前进
五、基于Vortex下载执行
将Vortex通过USB连接到电脑,打开Mind+,选择Vortex进入实时执行界面而后切换到下载执行界面,选择相应的串口。对指令进行如下图组合。而后点击上传到设备按钮,待上传完成之后

效果:vortex表情板显示程序中的样式